2022年9月26日
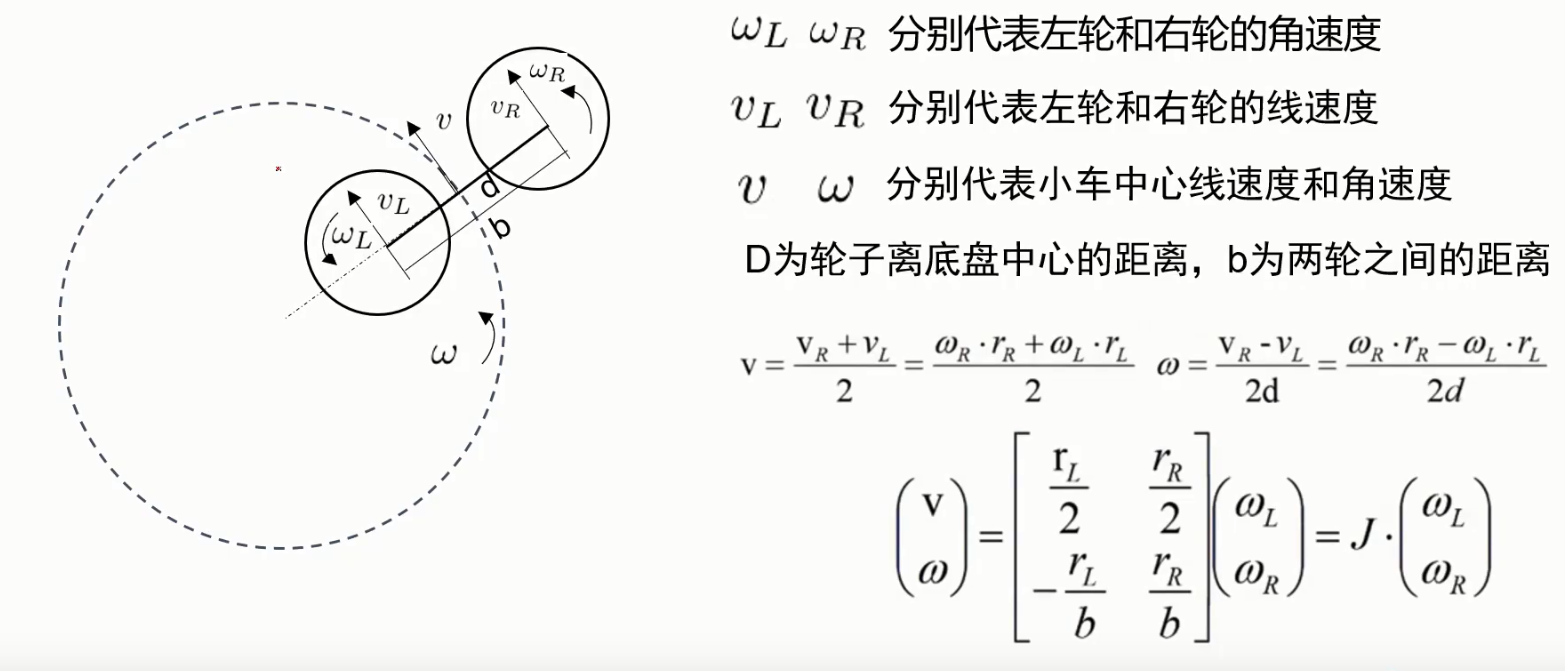
两轮差速底盘运动解算
- 运动学方程

- 干货
class MotionModel
{
public:
MotionModel(double wheel_radius, double body_radius);
virtual ~MotionModel();
// robot speed -> motor speed
virtual void MotionSolver(double *robot_speed, double *motor_speed) = 0;
// motor speed -> robot speed
virtual void GetOdom(odom_t odom, double * motor_speed, uint32_t interval = 20) = 0;
protected:
double wheel_radius_; // 车轮半径
double body_radius_; // 机器人半径
};
class DiffMotionModel : public MotionModel
{
public:
DiffMotionModel(double wheel_radius, double body_radius);
virtual ~DiffMotionModel();
// 通过 MotionModel 继承
virtual void MotionSolver(double* robot_speed, double* motor_speed) override;
virtual void GetOdom(odom_t odom, double* motor_speed, uint32_t interval = 20) override;
};
// 运动解算
void DiffMotionModel::MotionSolver(double* robot_speed, double* motor_speed)
{
motor_speed[0] = (robot_speed[0] - robot_speed[2] * body_radius_ ) / wheel_radius_;
motor_speed[1] = (robot_speed[0] + robot_speed[2] * body_radius_ ) / wheel_radius_;
SYS_DEBUG("robot_speed[%f, %f, %f], motor_speed[%f, %f]", robot_speed[0], robot_speed[1], robot_speed[2], motor_speed[1], motor_speed[0]);
}
// 速度推算里程计
void odom_interface::calc_vel_odom()
{
double dt = (curr_time_ - last_time_).toSec();
double delta_x = 0.0;
double delta_y = 0.0;
double delta_t = 0.0;
if (!IS_FLOAT_ZERO(curr_vel_.vx) || !IS_FLOAT_ZERO(curr_vel_.vy) || !IS_FLOAT_ZERO(curr_vel_.vt))
{
delta_x = (curr_vel_.vx * cos(curr_vel_.vt) - curr_vel_.vy * sin(curr_vel_.vt)) * dt;
delta_y = (curr_vel_.vx * sin(curr_vel_.vt) + curr_vel_.vy * cos(curr_vel_.vt)) * dt;
delta_t = curr_vel_.vt * dt;
odom_changed_ = true;
}
if (odom_changed_)
{
ROS_DEBUG_THROTTLE(LOG_CTRL_SPEED, "calc diff odom. diff_time(%f) diff_odom(%f %f %f=%f).", dt, delta_x, delta_y, delta_t, RADIAN_TO_ANGLE(delta_t));
odom_x_ += delta_x;
odom_y_ += delta_y;
odom_t_ += delta_t;
odom_t_ = fmod(odom_t_, 2 * PI);
ROS_DEBUG_THROTTLE(LOG_CTRL_SPEED, "calc total odom. vel(%f %f %f) odom(%f %f %f=%f).", curr_vel_.vx, curr_vel_.vy, curr_vel_.vt, odom_x_, odom_y_, odom_t_, RADIAN_TO_ANGLE(odom_t_));
}
}
参考: